Tail use improves performance on soft substrates in models of early vertebrate land locomotorsVideo 1. Example of a 'crutching' mudskipper, from one of my previously published papers (Kawano and Blob 2013). Video 2. Mudskipper moving on sand at an incline of 20 degrees, from McInroe et al. (2016) Supplementary video 2. 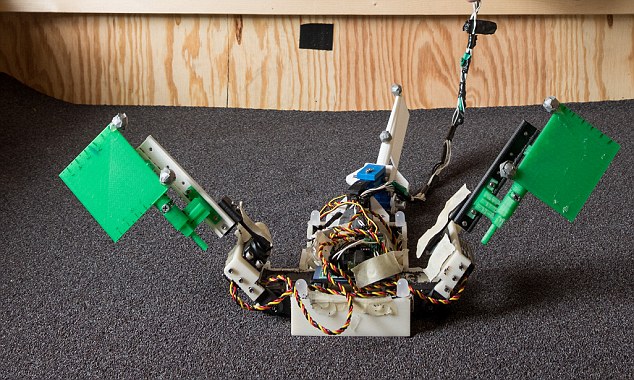 Figure 1. MuddyBot! Our mudskipper-inspired robot that was developed by my collaborators at Georgia Tech (crablab.gatech.edu/) I teamed up with researchers from Georgia Tech, Carnegie Mellon University, and Clemson University to gain new insights into how vertebrate animals overcome the challenge of moving on difficult terrain, such as soft substrates. Specifically, we focused on vertebrate animals that "crutch" to move around, meaning that they use synchronous movements of their appendages to move forward in a similar fashion that a person might use crutches (hence the term 'crutching'). See Video 1 above for an example of a 'crutching' mudskipper from one of my recent papers (Kawano and Blob 2013). The reason we chose a crutching animal is because at least one fossil stem tetrapod (Ichthyostega) is thought to have moved with a crutching gait, and crutching is a relatively basic form of locomotion that allowed us to focus on very specific aspects of the locomotor structures. We used a combination of a biological model (mudskipper fish; Video 2), robophysical model (MuddyBot; Figure 1), and mathematical model (geometric mechanics) to evaluate what a crutching animal did when moving on inclined sand, how a crutching animal coordinated its fins and tail to move on inclined sand, and why only particular combinations of fin + tail coordinations were successful (i.e., lead to forward progression). Working with such a talented and interdisciplinary group of collaborators was such a great experience and contributed a much more comprehensive evaluation of the locomotor biomechanics of crutching than a single discipline could have contributed alone. Thanks to my incredible collaborators for all of your hard work!
Check out the paper here: science.sciencemag.org/content/353/6295/154 With a Perspective on the paper here: science.sciencemag.org/content/353/6295/120 And media attention (subject to updates):
2 Comments
|
 RSS Feed
RSS Feed
