The following information describes work that was completed in conjunction with a Marie Skłodowska-Curie Actions Individual Fellowship that was awarded to Professor John Hutchinson at the Royal Veterinary College in 2016. Through this award, I served as a Curie research fellow to collaborate with John to evaluate how bone strength may have influenced the evolutionary invasion of land. This work builds upon my past research on the locomotor biomechanics of salamanders to integrate cutting-edge techniques in engineering and biomedical imaging to generate a comprehensive and interactive musculoskeletal model that can be used to address the physical challenges of becoming terrestrial.
Are salamanders a good model for the earliest terrestrial invader?
How tetrapods became terrestrial is one of the most transformative yet enigmatic events in the evolution of vertebrate animals. While it is generally accepted that the earliest tetrapods were aquatic, how early stem tetrapods took their first steps onto land is still an active area of enquiry. One of the prevailing theories on the evolution of terrestrial locomotion is that the initial stages resembled the lateral sequence walking gait of extant salamanders (see Figure 1). Yet, a recent analysis on the limb mobility of an early stem tetrapod, Ichthyostega, indicated that it was not capable of performing the rotary motions necessary for a salamander walking gait, raising a suspicion that a salamander-like waiting gait was not the earliest form of terrestrial locomotion (Pierce et al. 2012). We are conducted one of the first studies to test the popular ‘salamander walk’ hypothesis, that a salamander-like lateral sequence walk was the first form of terrestrial locomotion, and tests this hypothesis in a novel way. Our overall objective was to build dynamic 3D musculoskeletal models of salamander limbs in order to evaluate the mechanics of a lateral sequence walk and advance knowledge of locomotor aspects related to the water-to-land transition. By synthesizing a comprehensive data on musculoskeletal function from a modern analogue to stem tetrapods, important form-function relationships between limb bone morphology and locomotor behaviours can be clarified and serves as a solid foundation in which to develop more accurate models of stem tetrapods in the future. Identifying the ancestral condition for terrestrial locomotion is an important step towards understanding the diversification of all tetrapods thereafter. Moreover, tracing back the evolutionary steps to becoming terrestrial yields powerful insights into the tetrapod body plan, informing how ecological transitions influence functional innovation and how human anatomy is influenced by our ancestry from aquatic tetrapods.
How tetrapods became terrestrial is one of the most transformative yet enigmatic events in the evolution of vertebrate animals. While it is generally accepted that the earliest tetrapods were aquatic, how early stem tetrapods took their first steps onto land is still an active area of enquiry. One of the prevailing theories on the evolution of terrestrial locomotion is that the initial stages resembled the lateral sequence walking gait of extant salamanders (see Figure 1). Yet, a recent analysis on the limb mobility of an early stem tetrapod, Ichthyostega, indicated that it was not capable of performing the rotary motions necessary for a salamander walking gait, raising a suspicion that a salamander-like waiting gait was not the earliest form of terrestrial locomotion (Pierce et al. 2012). We are conducted one of the first studies to test the popular ‘salamander walk’ hypothesis, that a salamander-like lateral sequence walk was the first form of terrestrial locomotion, and tests this hypothesis in a novel way. Our overall objective was to build dynamic 3D musculoskeletal models of salamander limbs in order to evaluate the mechanics of a lateral sequence walk and advance knowledge of locomotor aspects related to the water-to-land transition. By synthesizing a comprehensive data on musculoskeletal function from a modern analogue to stem tetrapods, important form-function relationships between limb bone morphology and locomotor behaviours can be clarified and serves as a solid foundation in which to develop more accurate models of stem tetrapods in the future. Identifying the ancestral condition for terrestrial locomotion is an important step towards understanding the diversification of all tetrapods thereafter. Moreover, tracing back the evolutionary steps to becoming terrestrial yields powerful insights into the tetrapod body plan, informing how ecological transitions influence functional innovation and how human anatomy is influenced by our ancestry from aquatic tetrapods.

Figure 1. Salamanders are often represented as modern analogues to early stem tetrapods since salamander morphology has not changed in about 150 million years and generally resembles a basal tetrapod Bauplan. This video depicts the lateral sequence walk that salamanders used to walk on land. Previous models of salamander walking mechanics were static models and incorporated basic geometries of a subset of muscles. The work that John Hutchinson and I are collaborating on contributes much more comprehensive and dynamic musculoskeletal models that are capable of yielding much more information towards understanding what it takes to walk on land.
What does a 3D musculoskeletal model of salamander limbs look like?
We have integrated muscle anatomy with bone microstructure, geometry, and applied loads to develop one of the most realistic reconstructions of salamander walking to date in order to assess the emergent properties of limb bones in the context of moving on land. A dynamic 3D musculoskeletal model of the forelimb in an adult tiger salamander (Ambystoma tigrinum) was built to simulate limb mechanics during terrestrial walking (Figure 2). The components of this interactive 3D musculoskeletal model included bones, joints, segment masses, and segment moments of inertia that were obtained from salamander cadavers. These data were then integrated with empirical data on the locomotor motions (kinematics) and forces (kinetics) experienced during walking in A. tigrinum from Kawano et al. 2016. Data were collected and partially processed for creating and analyzing the hindlimb model.
Simulations of the musculoskeletal model indicated that terrestrial walking was primarily driven by motions at the shoulder and wrist. In addition, simulated muscles generally followed functions presumed in previous research with the exception that novel stabilizing functions were revealed, demonstrating the powerful insights that can be gleaned from such comprehensive computer models. By incorporating micro-CT scanning and contrast-enhanced iodine staining, we were also able to gain a much more in-depth look into the internal anatomy of salamander limbs. For instance, previous anatomical dissections of other salamanders have suggested that the anconaeus coracoideus (AC) muscle merged with the anconaeus scapularis medialis (ASM) muscle along the humerus, with both inserting onto the olecranon process of the ulna. This would suggest that the moment arms for AC and ASM would favor extension about the elbow joint. However, our micro-CT scans of the forelimb in Ambystoma tigrinum indicate that the AC does not insert onto the olecranon process of the ulna (Figure 3) and, thus, cannot be modeled as an elbow extensor.
We have integrated muscle anatomy with bone microstructure, geometry, and applied loads to develop one of the most realistic reconstructions of salamander walking to date in order to assess the emergent properties of limb bones in the context of moving on land. A dynamic 3D musculoskeletal model of the forelimb in an adult tiger salamander (Ambystoma tigrinum) was built to simulate limb mechanics during terrestrial walking (Figure 2). The components of this interactive 3D musculoskeletal model included bones, joints, segment masses, and segment moments of inertia that were obtained from salamander cadavers. These data were then integrated with empirical data on the locomotor motions (kinematics) and forces (kinetics) experienced during walking in A. tigrinum from Kawano et al. 2016. Data were collected and partially processed for creating and analyzing the hindlimb model.
Simulations of the musculoskeletal model indicated that terrestrial walking was primarily driven by motions at the shoulder and wrist. In addition, simulated muscles generally followed functions presumed in previous research with the exception that novel stabilizing functions were revealed, demonstrating the powerful insights that can be gleaned from such comprehensive computer models. By incorporating micro-CT scanning and contrast-enhanced iodine staining, we were also able to gain a much more in-depth look into the internal anatomy of salamander limbs. For instance, previous anatomical dissections of other salamanders have suggested that the anconaeus coracoideus (AC) muscle merged with the anconaeus scapularis medialis (ASM) muscle along the humerus, with both inserting onto the olecranon process of the ulna. This would suggest that the moment arms for AC and ASM would favor extension about the elbow joint. However, our micro-CT scans of the forelimb in Ambystoma tigrinum indicate that the AC does not insert onto the olecranon process of the ulna (Figure 3) and, thus, cannot be modeled as an elbow extensor.
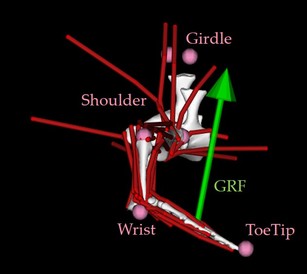
Figure 2. 3D musculoskeletal model of the forelimb in Ambystoma tigrinum. The muscles are represented as red strings. The ground reaction force (GRF) vector is illustrated in green, and the landmarks that were digitized from high-speed videos are represented in pink spheres.
|
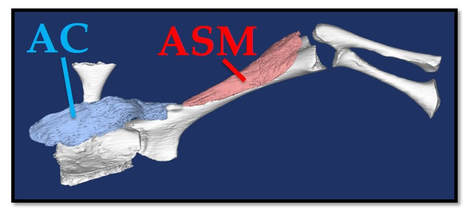
Figure 3. 3D model of the forelimb in the tiger salamander (Ambystoma tigrinum). The objects in white are (from left to right): shoulder girdle, humerus, and ulna + radius. The anconaeus coracoideus (AC) muscle is in blue and the anconaeus scapularis medialis (ASM) muscle is in red.
|
Figure 4. Here is an early draft of the musculoskeletal model of the forelimb in A. tigrinum during terrestrial locomotion! The current model has been modified since this draft, but this gives a general overview of what the motion looks like.
List of activities associated with this work
- A portion of this work has been disseminated through a poster presentation at the 2017 Society for Experimental Biology annual meeting in Gothenburg, Sweden.
- A portion of this work has also been shared at an invited seminar talk to the Paleobiology Discussion Group at the University of Bristol (U.K.).
- Here is a copy of the abstract: www.bris.ac.uk/earthsciences/events/2017/earth-sciences---palaeo-discussion-group---kawano.html
- Palaeocast podcast was kind enough to post a video of the seminar talk to help communicate the information to a broad group, including >3,500 followers on Twitter! www.youtube.com/watch?v=zPvrOdFlZm4&feature=youtu.be
- Information about the locomotor biomechanics of the evolutionary invasion of land was incorporated into educational coursework through a guest lecture in the Comparative Animal Locomotion module at the Royal Veterinary College.
- We also collaborated with other students and staff at the Structure and Motion Laboratory at the Royal Veterinary College to broaden knowledge about the evolutionary biomechanics of vertebrate locomotion, including the water-to-land transition, through an outreach exhibit at the Royal Veterinary College Open Day event.
Our research is on-going so stay tuned for more!

|

|

|
